
Introducing EvoMindTM Algo: Emboding Human Cleaning Intent in Robot
Introducing EvoMindTM Algorithm
EvoMind™ is driven by an evolutionary learning algorithm that enables robots to learn human cleaning intent, ultimately allowing them to operate with human-like efficiency, flexibility, and intelligence. EvoMind™ Algorithm is a series of firsts:
-
Real-time precision AI-adaptive cleaning: xLean TR1 dynamically adjusts its cleaning strategy based on real-time analysis of detected dirt levels — performing deep cleaning for tough stains and fast cleaning for light messes.
-
Dirt hunting mode: xLean TR1 is the first cleaning robot engineered to actively seek out messes. It autonomously scans the floor, identifies dirt, makes human-like cleaning decisions where needed, and delivers targeted cleaning.
-
Learning human cleaning behavior and intent: Through handheld use, xLean TR1 learns human cleaning behaviors and continuously evolves over time. With ongoing use, its decision model improves, making the robot progressively smarter and more aligned with how you clean.
New Intelligence for Cleaning Robotics
Most cleaning robots on the market are products of traditional automation. Their behavior is defined by static, preprogrammed rules, carefully engineered for a limited set of expected scenarios. This approach performs adequately in controlled, predictable environments. But when conditions drift from prior assumptions—as real homes inevitably do—adaptation becomes constrained, and long-term improvement effectively plateaus.
xLean TR1 breaks this mold.
It is built on self-evolving intelligence, starting from a foundational level of autonomous capability. Rather than relying on fixed logic, TR1 operates on an adaptive core that learns directly through interaction.
Its decision-making policies are shaped by context, feedback, and outcomes. Through the evolutionary learning in the handheld form, the robot’s decision-making becomes increasingly intelligent and flexible, enabling it to generalize beyond predefined cases and respond robustly to uncertainty and variability.
The result is not merely a cleaning robot, but a self-improving embodied intelligence system—one that becomes progressively more capable, more adaptive, and increasingly aligned with human cleaning judgment over time.
How
Intelligence
Scales
—Two
Different Paths
Intelligence
Scales
—Two
Different Paths
Intelligence Scaling/ Complex-
Environment Adaptation
Environment Adaptation
Traditional Cleaning Robots
Time
xLean TR1
Continuously learns and improves through ongoing model training.
Traditional Cleaning Robots
Intelligence growth relies on engineers and preset rules.
What Is to Embody Human Cleaning Intent?
After analyzing over ten thousand user reviews and comments (spanning more than 1,000 pages of qualitative data, closely to 2 books ), we studied how humans and robots differ in real-world cleaning behavior. The research confirms a clear pattern: robots excel at consistent routine cleaning, while humans remain superior in adaptability, precision, and complex decision-making.

More importantly, this research revealed what truly defines effective cleaning — not just execution, but cleaning strategy and adaption. Human cleaning behavior consistently demonstrates advantages over robotic cleaning in three fundamental ways, which together form the foundation of human cleaning intent.
1. Strategic and Flexible Decision-Making
Humans are capable of developing high-level cleaning strategies. Planned deep cleaning is typically carried out one to two times per week to ensure a comprehensive clean of the entire home. During this process, high-dirt and high-traffic areas such as the kitchen, dining room, and living room receive greater attention due to their higher cleaning frequency. In everyday routines, humans continuously monitor the home and perform targeted cleaning whenever spots or messes are identified. This kind of routine maintenance cleaning helps keep floors consistently clean.
2. Adaptability to Complex Environments
Humans perform particularly well in tight, intricate spaces, complex layouts, and high-traffic areas where extra attention is required. Unlike robots, human cleaners can easily adjust their actions to suit irregular environments and challenging cleaning conditions.
3. Flexible Judgment and Experience
Another key difference lies in humans’ ability to actively respond to what they observe. Based on the type and severity of messes, humans can apply intensive cleaning for stubborn stains and quick cleaning for light dirt, achieving efficient and appropriate cleaning results in different situations.
Human judgment and behavior is the gold standard for cleaning. It is adaptive, efficient, and intelligent. The Evomind™ Algorithm is designed to transfer these human-level cleaning strategies to the xLean TR1, enabling robots to move beyond rigid routines. By embedding human cleaning intent into robotic decision-making, Evomind™ minimizes human intervention while delivering optimal cleaning results at maximum efficiency.
How to Embody Human Cleaning Intent
xLean TR1 is built on reinforcement learning from embodied robotics, enabing it a basic level of autonomous intelligence from beginning. Through Reinforcement Learning from Human Feedback (RLHF), the robot continues to learn and evolve during handheld use, gradually developing human-like obstacle avoidance, stuck recovery, and more intelligent autonomous cleaning decisions. The more you use it, the more intelligent and efficient it becomes.

Breakthrough 1: Training at Scale with Millions of Simulated Environments
Before entering real homes, xLean TR1 is pre-trained across millions of high-fidelity simulated environments, establishing the robust foundation for intelligent behavior. This large-scale simulation training enables high-efficiency path planning, reliable obstacle avoidance, and real-time adaptive cleaning strategies in physical environments.
The simulation corpus spans a wide spectrum of household conditions—from simple layouts to extreme and highly cluttered scenarios—ensuring strong robustness when the robot is deployed in complex, real-world homes.
Breakthrough 2: Continuous Evolution in Handheld Mode
In handheld form, xLean TR1 continuously captures user real-time cleaning operations, including stuck-recovery strategies, obstacle avoidance, adaptive cleaning force based on dirt-level, and repeated cleaning for frequently soiled areas.
These behaviors represent high-quality human cleaning strategies generated through valuable experience in complex environments. By continuous learning from real-world human operation, xLean TR1 converts human intuition into generalizable machine policies, gradually developing human-like judgment and execution in cleaning tasks.
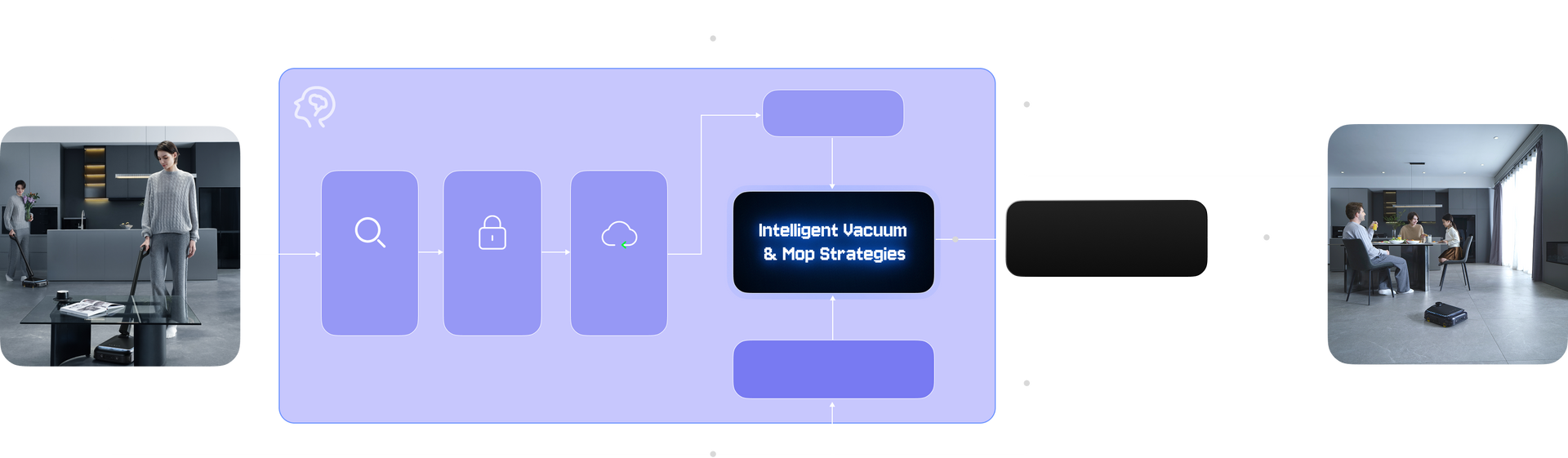
Running in Handheld Form
Embodies Human Intent in Cleaning
Data
Filtering
Filtering
Data Encoding
& Privacy
Protection
& Privacy
Protection
Cloud
System
System
Reward Model
Reinforcement
Fine-Tuning
Fine-Tuning
Multi-Sensor System
Motion Control &
Cleaning Efficiency
Optimization
Cleaning Efficiency
Optimization
Autonomous
Running Loop
Running Loop
Home Cleaning
(Analyzes and learns from human cleaning behaviors,
including obstacle avoidance, recovery, deep cleaning, and high-dirt area cleaning.)
including obstacle avoidance, recovery, deep cleaning, and high-dirt area cleaning.)
Handheld Loop
1. Environmental Perception and Decision-Making
Effective intelligent cleaning begins with accurate environment perception and reliable evaluation of cleaning outcomes. By fusing data from the 360° LiDAR system, RGB-D cameras, and 44,640 3D sensing points, xLean TR1 builds a high-precision spatial perception model, enabling stable localization and robust obstacle avoidance.
At the same time, the system performs real-time detection and assessment of dirt levels. Only by understanding where the dirt is and how severe it is can the robot dynamically adapt its cleaning strategy, rather than mechanically repeating preset actions. Importantly, xLean TR1 also evaluates cleaning results—learning what is “truly clean”—and uses this judgment as a core feedback for cleaning strategy optimization.
2. Data Curation and Integration
Not all real-world data is suitable for learning. Handheld user operation data will undergoe strict filtering and validation, automatically removing low-quality, anomalous, or extreme samples. Only high-value behaviors that represent effective cleaning decisions are retained, ensuring that the model evolves within a consistently high-quality data regime.
Cloud training integrates two primary data sources:
-
Human handheld cleaning behavior data
-
Standardized execution records from robot's autonomous cleaning policy
Because handheld behaviors and robot's autonomous policies originate from different decision processes, EvoMind™ Algorithm anchors learning to standardized autonomous policies and applies reward-based reinforcement fine-tuning. This design ensures that each policy update remains stable, continuous, and controllable.
3. Reward-Model-Driven Progressive Evolution
The system leverages a combination of human and automated labeling, then comparing results between user-operated cleaning and fully autonomous execution under the same scenario. When handheld behavior is evaluated as superior, the system identifies deficiencies in the current reward model and updates the reward function accordingly.
With the refined reward model, autonomous cleaning policies are re-optimized, enabling performance improvements that generalize across diverse environments. This is not a one-off training procedure, but a continuous cycle of reward refinement and policy evolution.
4. Privacy-First Intelligent Learning
All sensitive information—including images and home layouts—is anonymized and encoded locally before being uploaded to the cloud. The system learns only the causal relationship between behavior and cleaning outcomes, without storing any raw data that could reconstruct user privacy.
Through this closed-loop pipeline—data collection → filtering → comparison → reward model update—xLean TR1 continuously converts human operational experience into improvements in autonomous cleaning policies. Each user interaction contributes to a shared learning system, enabling collective intelligence across the entire user base.
The Results of Intelligence
1. Real-time Precision AI Adaptive Cleaning
Unlike traditional robots that rely on fixed paths and repetitive passes, xLean TR1 dynamically detects dirt levels and leverages evolutionary algorithms to clean with human-like efficiency. It focuses intensive cleaning where contamination is heavier and moves quickly through cleaner areas, achieving at least 50% higher cleaning efficiency while delivering spotless results.
2. Advanced Obstacle Avoidance
xLean TR1 currently supports over 400+ obstacle recognition, covering more than 99% of floor scenarios. Through continuous iteration, the system is progressively addressing the remaining situations—highly cluttered spaces, narrow passages, and complex furniture layouts.
3. High-dirt Area Maintenance
Across both robot and handheld cleaning form, EvoMind™ Algorithm automatically identifies and tracks the high-dirt area in your home, dynamically delivering smarter and more adaptive cleaning strategies.

4. Dirt Hunting Mode
xLean introduces an innovative Dirt Hunting Mode designed for daily household maintenance. The robot proactively scans the home, detects localized dirt, and performs targeted cleaning on demand—improving overall efficiency while reducing energy consumption.
Three-in-One: A Complete Home Cleaning System
xLean TR1 is not a single-function device, but a coordinated cleaning ecosystem built around three complementary modes:
-
Fully Autonomous Mode(Robot Mode The robot performs scheduled deep cleaning—typically once or twice per week—to establish and maintain a baseline level of household cleanliness.
-
Intelligent Dirt Hunting Mode Designed for daily maintenance, this mode proactively inspects the home, detects localized dirt, and performs targeted cleaning to keep spaces consistently clean.
-
Handheld Mode Beyond spot or emergency cleaning, the handheld unit serves as the primary learning interface for system evolution. It translates human cleaning intent into machine-understandable signals and data, continuously refining the robot’s intelligence.
xLean TR1 – How Each Mode Actually Helps You
|
Robot Mode
|
Dirty Hunting Mode
|
Handheld Mode
|
|
|
What It Does
|
Scheduled Deep Cleaning
|
Active Daily Patrols
|
Instant precision cleaning
|
|
When to Use It
|
1–2 times per week for whole-home maintenance
|
Daily maintenance, after family activities, meals, or high traffic
|
Spot cleaning, emergencies, detailed areas
|
|
Problems It Solves
|
Runs scheduled deep cleaning to reset your entire home’s cleanliness.
|
Proactively checks for new messes and cleans only where needed. Prevents dirt buildup through real-time detection.
|
Lets you handle tight spots or urgent messes instantly — while also teaching the robot what you consider important.
|
Together, these three modes form a closed-loop system that transforms cleaning from passive task execution into continuous learning and active decision-making. Every handheld interaction trains the robot’s understanding, and every autonomous run applies those learned strategies in real-world tasks.
Summary
Powered by the EvoMind™ evolutionary algorithm, xLean TR1 is evolving from a tool that executes cleaning tasks into an intelligent system that understands household environments. The focus extends beyond efficiency gains to a fundamental reconstruction of cleaning logic—endowing robots with human-like decision-making capabilities and transforming repetitive tasks into intelligent collaboration.
xLean TR1 continuously learns from each home it serves, adapting deeply to user habits and spatial layouts, autonomously maintaining high-quality cleanliness while improving over time.
The future of cleaning is flexible, intelligent, and efficient. And it begins with EvoMind™.
Meet the Next-Gen
Cleaning Robot
The World's First Dual-form Transformable Floor Washing Robot with Human Cleaning Intent.
Buy Now